


8月18日至20日,第二十届全国大学生智能汽车竞赛全国总决赛在杭州电子科技大学成功举行。本届大赛吸引了来自全国的567支代表队参与十个竞速项目的激烈竞争。我院派出的两支队伍表现优异,全部获奖,经过顽强拼搏,最终取得一等奖1项、二等奖1项的优异成绩。

平衡轮腿组
小组成员:张化亮、陈俊翰、黄乐涵
指导老师:田炜、唐辰

平衡轮腿组以Infineon TC264DA作为主控平台,配合六轴IMU660RA传感器与摄像头,实现多传感器信息融合,驱动轮腿V型车模在包含单边桥、环岛、坡道及路障等多种障碍元素的复杂赛道上稳定运行并完成全程循迹。团队针对轮腿式结构的特点,在机械方面优化了整车配重与悬架调整,增强越障能力;硬件上设计双板结构,主板集成供电与信号处理,驱动板专攻无刷电机控制;软件层面采用逆透视变换进行赛道识别与轨迹提取,结合PD控制算法与卡尔曼滤波实现车身平衡与姿态解算,有效提升车模在动态环境中的响应速度与抗干扰能力。最终,凭借系统性的软硬件协同设计、精细的控制策略与稳定的现场发挥,在竞争激烈的平衡轮腿组别中取得全国第七名的优异成绩,荣获全国总决赛一等奖。
独轮信标组
小组成员:廖宏烨、梁文杰、柳一凡
指导老师:田炜、唐辰

独轮信标组的核心任务是在室内特定场地中,控制独轮车模依次定位并熄灭多个信标灯。团队以Infineon TC387QP作为主控芯片,结合CYT2BL3无刷电机控制单元,并借助IMU实现车体姿态的精准感知。在机械结构上,基于Q车模采用3D打印镂空安装板与轻量化翼型设计,显著降低重心并提升整体刚性。硬件方面,自主研发了专用于无刷与有刷电机的驱动板,确保动力系统响应迅速、运行可靠。
软件算法上,实现了基于图像二值化、区域筛选和距离判断的信标灯快速识别与定位,结合PID控制算法与卡尔曼滤,分别用于车体平衡、转向和速度控制,有效提升在动态干扰下的抗噪性能与循迹稳定性。通过反复调试灭灯策略与运动参数,最终,凭借稳定的硬件平台与高效的算法策略,圆满完成比赛任务,荣获全国总决赛二等奖。
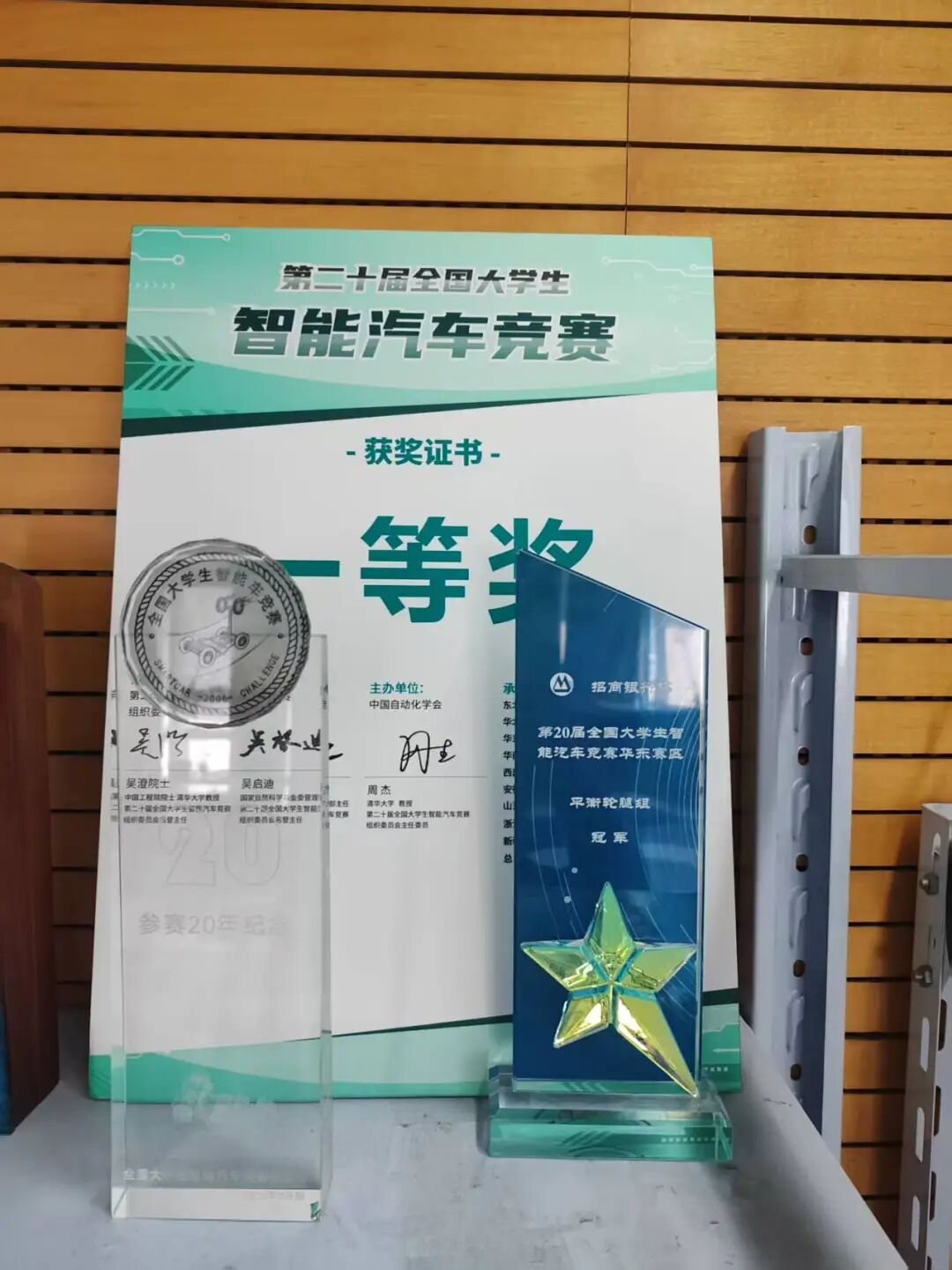
同时,汽车学院TU-Smart智能车队和电子与信息工程学院智能竞赛实验室车队作为同济大学代表共同荣获组委会颁发的智能车竞赛二十年连续参赛(学校)奖杯。
团队及指导老师合影
供稿|柳一凡 李泉霖
审核|王娇婻
责编|葛 畅 史静远 吴 诗

我要评论 (网友评论仅供其表达个人看法,并不表明本站同意其观点或证实其描述)
全部评论 ( 条)